Extensive Universal Expansion Interfaces
Equipped with serial port, USB Type-A, USB Type-C Ethernet, and other interfaces, it effortlessly connects to various peripherals (vision sensor modules, UWB positioning modules, ad hoc networking modules, millimeter-wave radar, GPS positioning modules, etc.*), adapting to multiple application scenarios.
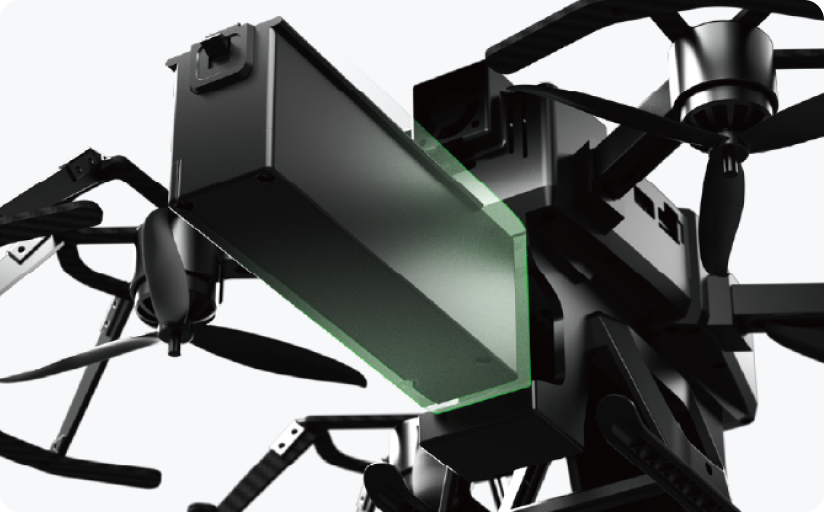
Long-lasting hot-swappable battery
Self-developed high-energy-density lithium polymer battery delivers up to 35 minutes of continuous operation per charge. Supports quick-release and hot-swap functionality, enabling rapid battery replacement without shutdown to significantly boost experimental efficiency.
Abundant AI onboard computing power
Equipped with the NVIDIA Jetson Cube NX 16GB high-performance onboard computing unit, delivering up to 100 TOPS of powerful computing power to provide stable and reliable computational support for algorithm development.
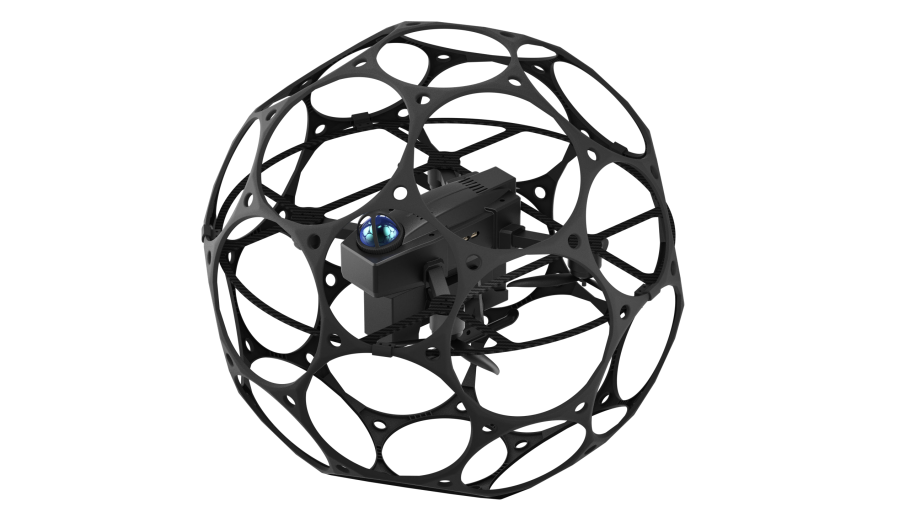
360 Full-Coverage Paddle Protection
Constructed from high-performance engineering plastics, it features a 360-degree full-coverage protective structure with outstanding impact resistance and drop durability. This design effectively mitigates collision risks and ensures safe operation.